機能概要
入力画像Aの指定領域内から登録したテンプレートと類似する物体を探索し、検出した座標を出力します。
本部品で検出できる物体は最大1個で、検出した座標は指定領域からの相対座標を出力します。
※実機側でのみ動作(シミュレーションモードでは動作しません)
本部品で検出できる物体は最大1個で、検出した座標は指定領域からの相対座標を出力します。
※実機側でのみ動作(シミュレーションモードでは動作しません)
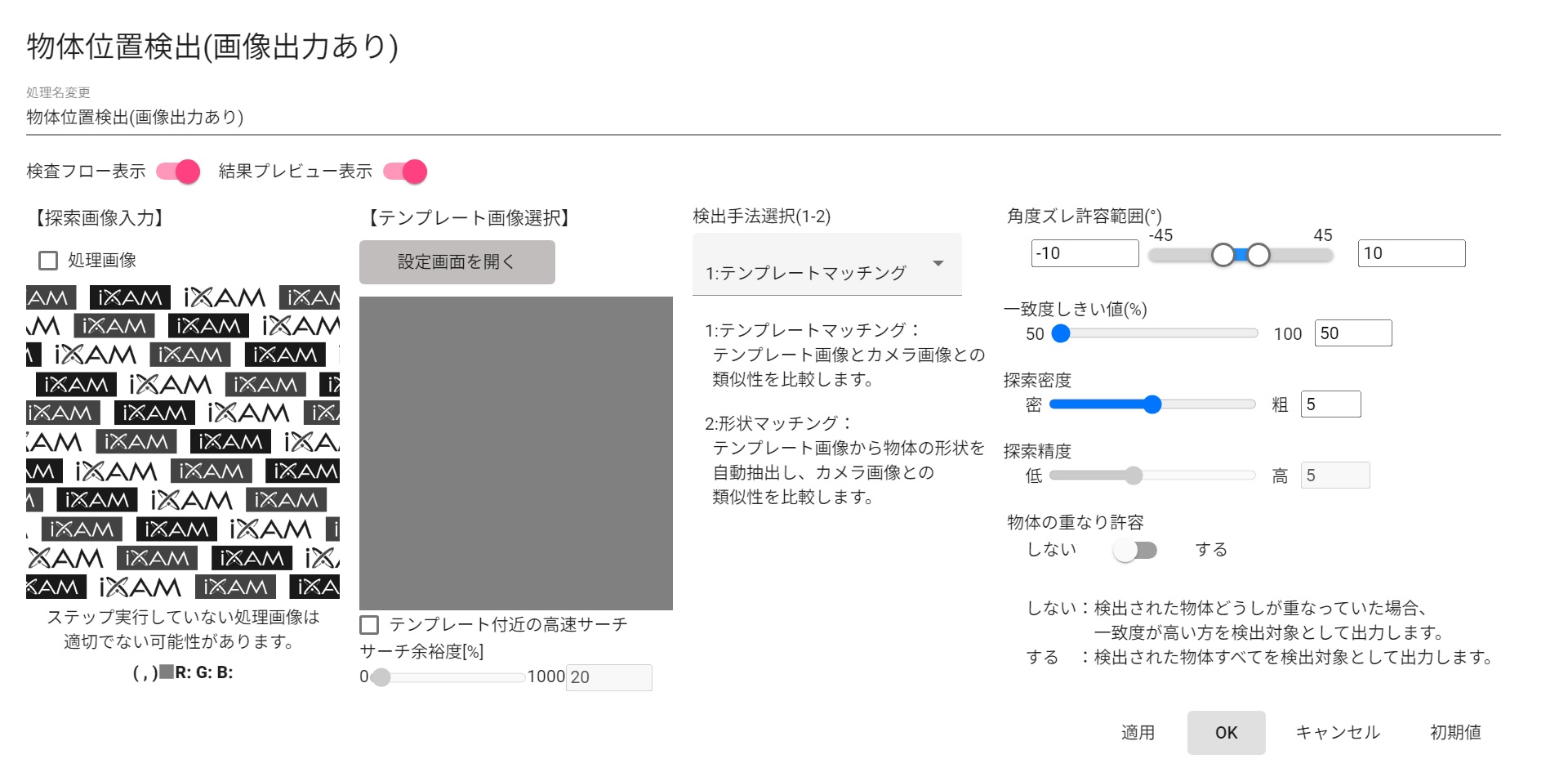
プロパティ画面
入出力仕様
| 部品名称 | 物体位置検出(画像出力あり) | |
|---|---|---|
| 入力仕様 | 画像A | モノクロ画像 |
| 画像B | カラー画像・モノクロ画像(テンプレート) | |
| 出力仕様 | 画像 | カラー画像 |
| パラメータ |
|
|
| 機能一覧 | - | |
| プロパティ項目 | 検出手法選択(1-2) | 物体の位置を検出する方法を指定します
テンプレートマッチング:テンプレート画像とカメラ画像との類似性を比較します 形状マッチング:テンプレート画像から物体の形状を自動抽出し、カメラ画像との類似性を比較します |
| 角度ズレ許容範囲(°) | テンプレートと物体の角度ズレの許容範囲を指定します
角度ズレが許容範囲内である物体を検出します +方向は時計回り、-方向は反時計回りです |
|
| 一致度しきい値(%) | 一致度はテンプレートと物体が類似している度合いで、一致度がしきい値以上である物体を検出します | |
| 探索密度 | 物体の探索密度を指定します
値が小さいほど物体を密に探索します |
|
| 探索精度 | 検出手法に形状マッチングを選択した場合に物体の探索精度を指定します
値が大きいほど高い精度で探索します |
|
| 物体の重なり許容 | 重なりを検出しない/するを指定します
しない:同一の物体に対して多重検出した候補から、一致度が高いものを検出対象として出力します する :検出した全ての候補を検出対象として出力します |
|
| テンプレート付近の高速サーチ | チェック有りの場合、テンプレート付近のサーチを行います
サーチ余裕度は、サーチ領域をテンプレートの大きさより何%大きくするか指定します |
|